


Service Hotline:0536-3125886


The first step is to start the locomotive and move the entire robotic arm to the center position of the feeding port of the ball mill.
The second step is to adjust the appropriate height by lifting the main beam, and then insert the telescopic arm at the front end of the main beam into the interior of the ball mill.
The third step is to support the oil cylinders at the four corners of the mechanical locomotive and use tension bolts to connect the locomotive to the ground as a whole.
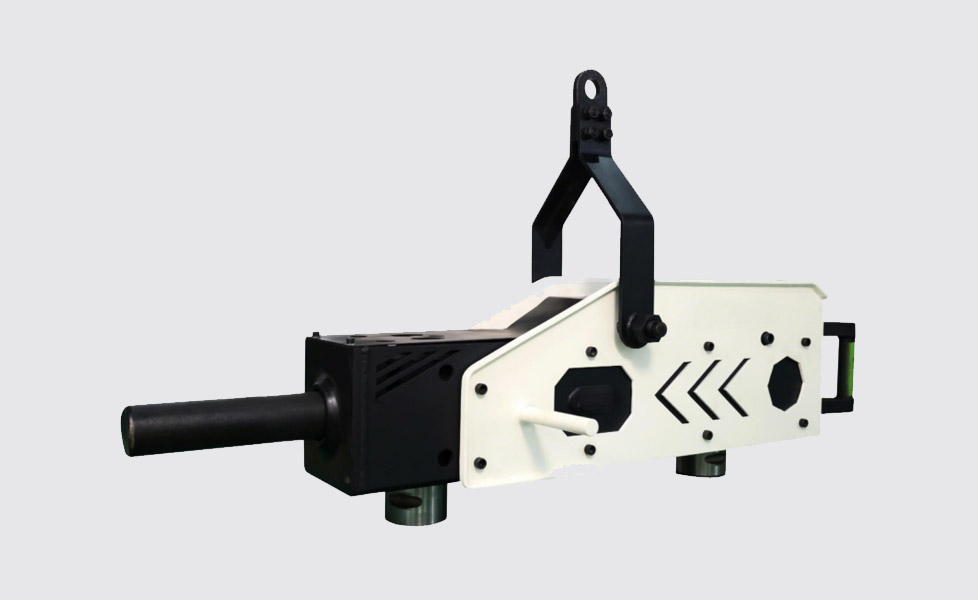
The front end of the seven degree of freedom robotic arm telescopic arm is equipped with a hydraulic rotating claw. Firstly, the new lining plate transported from the outside of the ball mill is clamped and lifted, and then it is accurately sent to the installation position through the telescopic arm.
After completing all the lining plate replacement work, loosen the locomotive tension bolts, retract the support oil cylinder, retract the main beam telescopic arm and lower it, and finally drive the locomotive back to the parking position.
1. The diameter of the feeding port of the ball mill is ≥ Φ 1300mm;
2. Diameter of ball mill cylinder: Φ 5000mm to Φ 6600mm;
3. The length of the ball mill cylinder is 5000mm to 7500mm.