


Service Hotline:0536-3125886

Identification System
◎ Employs a binocular 3D camera to provide high-precision image data.
◎ Utilizes a ≥ 500TOPs AI computing platform to achieve high-precision and high-efficiency foreign object identification.
◎ Recognition rate ≥ 95% (for foreign objects > 50cm), providing a reliable foreign object removal solution for mining enterprises.
◎ Ensures production safety and efficiency, significantly reducing equipment failure and accident risks.
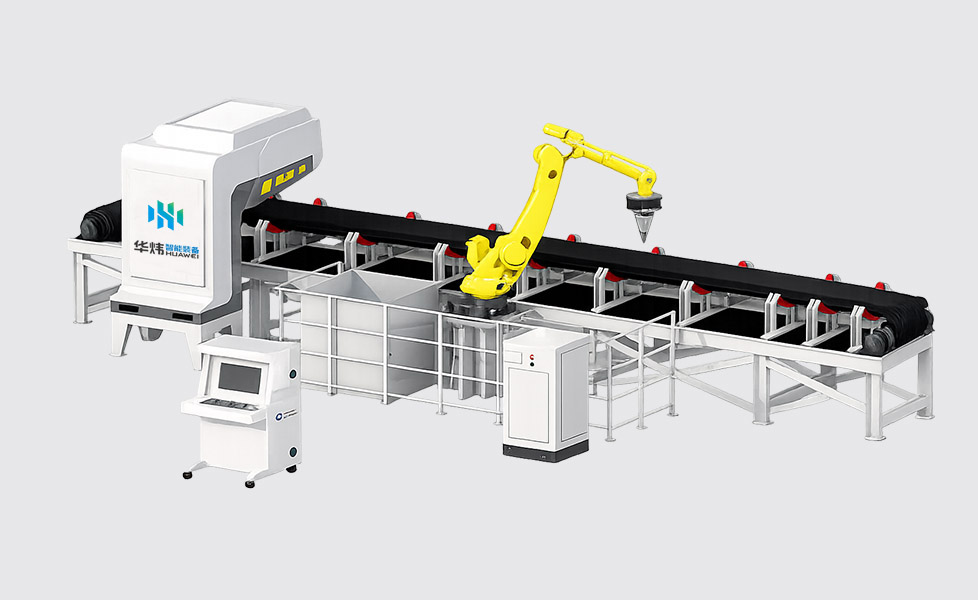
Execution System
◎ Equipped with a 6-axis collaborative robotic arm (customizable load, accuracy ±0.05mm) and a bionic compliant gripper (grasping cycle ≤ 4.5s).
◎ Bus synchronous control ensures fast, accurate, and stable foreign object grabbing.
◎ Meets the requirements for high efficiency and high precision in foreign object removal.
◎ Effectively reduces production interruptions and equipment damage, improving production efficiency and economic benefits.
Compatibility and Environmental Adaptability
◎ Supports rapid deployment to adapt to different mining production needs.
◎ Compatible with conveyor systems with belt width ≤ 1.2m, speed ≤ 1.7m/s, and inclination angle ≤ 15°.
◎ Foreign object removal rate on ore surface ≥ 90%.
◎ Foreign object size range: Length 10-120cm, Width < 20cm, Weight ≤ 30kg
◎ Wide operating temperature range (-20℃ ~ 60℃), IP67 protection rating, supports TSN network architecture.
◎ Ensures stable operation in harsh mining environments, reducing equipment maintenance costs.
◎ Ensures stable operation in harsh mining environments, reducing equipment maintenance costs.


